パレタイザー・ロボットアームの安全対策
現代の倉庫では、ロボットによるパレタイジングが開放的で高速なエリアで行われるケースが増えています。パレタイザーや多関節ロボット、グリッパーは、人やフォークリフトと近接した環境で稼働することも少なくありません。 こうしたゾーンは高い生産性を実現する一方で、人と機械が交錯することによるリスクも伴います。 そのため、安全対策は個々の設備だけでなく、マテリアルフロー全体に沿って設計され、レイアウトの計画段階から組み込まれることが重要です。
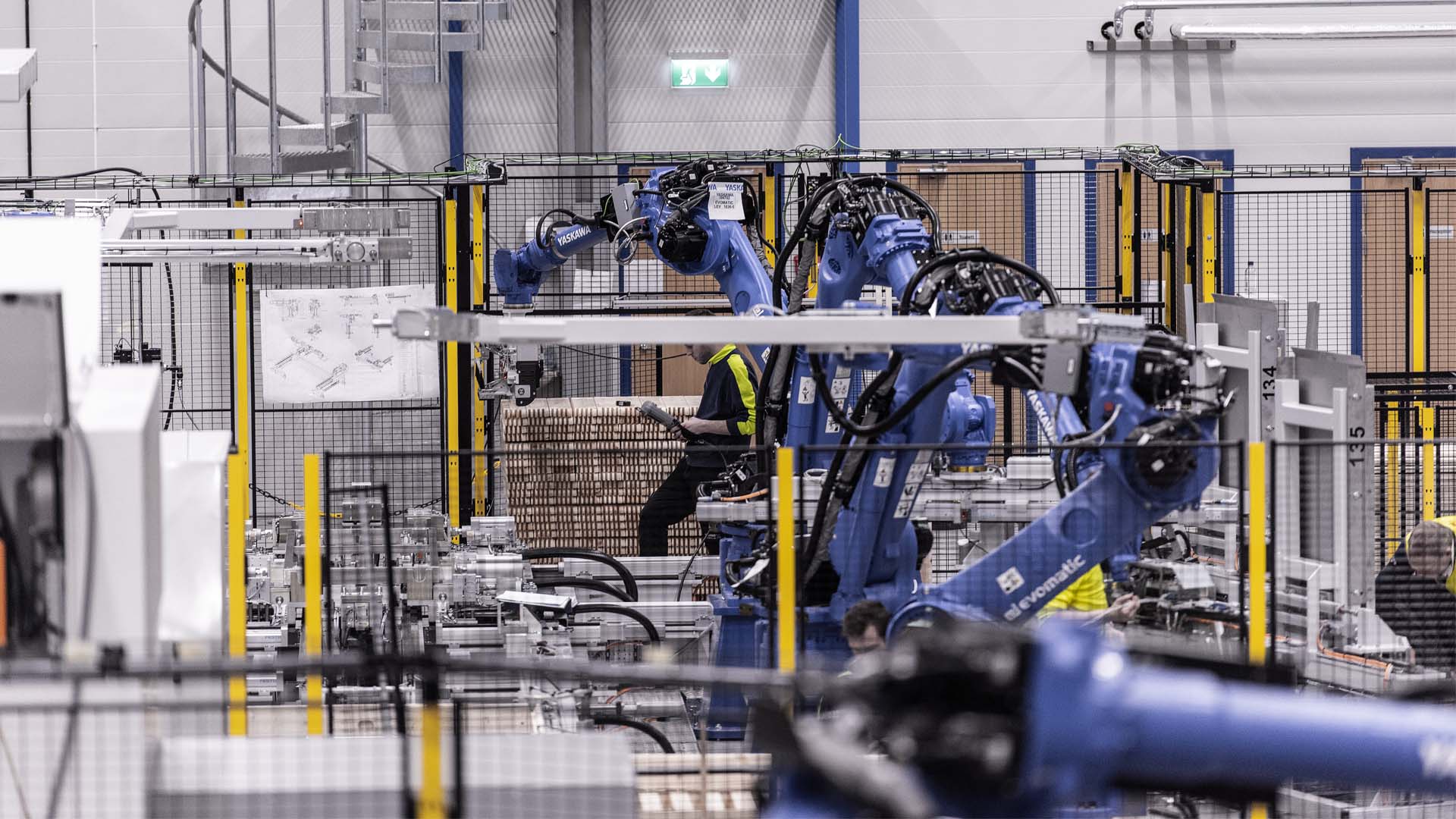
共有ゾーンの安全設計
ロボットアームやグリッパーは、人、フォークリフト、 AMRと隣接して作業します。この環境は高速で効率的ですが、リスクを伴います。
Axelentは、プロセスを妨げずに重要なポイントで人を保護するモジュール式システムで、安全をフローに沿わせます。
ロボットパレタイジングにおける典型的な課題:
- ロボットアームやグリッパーの高速移動
- 清掃、点検、トラブル対応のための手動アクセス
コンベヤ交差点やハンドオフポイントでの露出
固定式の安全柵だけでは不十分です。

パレタイザーにおける安全リスク
フォークリフトや AMR はパレタイジングセルの近くを通過することが多く、軽微な衝突でもガードや設備に損傷が生じ、想定外の停止につながります。アクセレントは、日常的な倉庫内トラフィックに対応した 安全柵 と 衝撃プロテクター でこれらのゾーンを守ります。
ハンドオフポイント、交差点、パレットの投入箇所は本質的に露出しやすく、わずかな遅延やミスでフロー全体が停止する可能性があります。モジュール式ガード、バリア、視覚的誘導を活用することで、Axelentはこれらのゾーンでの安全な移動をサポートします。
オープンまたは半オープンレイアウトでは、通路が不明瞭で管理されていないアクセスがリスクとなることがあります。スマートゾーニング、インターロック、 バリアを用いて、移動経路とアクセスを明確にし、人とプロセスを安全に保ちます。
Axelentが提供するロボットパレタイジングのサポート:
- ロボットセルへの安全で明確なアクセスの確保
- ロボットの動きを含む動的レイアウトの保護
- 人と機械の衝突リスクの最小化
- EU機械指令、OSHA規制、ISO 12100、ANSI B11.0、CSA Z432などの安全基準への準拠
Axelentの安全ソリューションは、レイアウト変更にも適応するモジュール式ソリューションで、検証が早く、設計変更を最小限におさえます。
ロボット周辺の安全対策
ロボットセルの安全は、単なるガード設置だけではありません。多くのパレタイジング、関節型ロボットの環境では、作業者、フォークリフト、モバイルロボットが同じ空間を共有することがあります。
Axelentの安全対策ソリューション:
- ガイド付き通路での明確なアクセスゾーン
- 手動アクセス時の物理的バリア
- 手動アクセス中にロボットを停止させるスマート統合
これにより、ロボットパレタイジングセルは作業フローを妨げず、安全性を確保できます。
計画段階からコンプライアンスを組み込む
安全対策を後付けで追加すると、再設計やスケジュール遅延、文書対応の負担が発生しやすくなります。Axelentは、CEマーキングや検証をサポートするモジュール式システムで、導入初日からコンプライアンスを確立します。
対応規格:
- EU機械指令/規則
- OSHA規則
- ISO 12100
- ISO 13857
- ISO 14120
- ANSI B11.0
- ANSI B11.19
- CSA Z43
レイアウト段階でゾーニングとインターロックを組み込むことで、フローを妨げずにシステムの検証が容易になります。



お問い合わせ
倉庫自動化の安全対策について、ご相談ください。プロジェクトのご相談や、現場に合わせたカスタマイズのアドバイスが必要な場合は、Axelentの安全専門チームが、計画から導入まであらゆるステップを丁寧にサポートします。
ロボティクスや自動化設備と連携し、実際の運用に適した安全対策の構築をお手伝いします。レイアウトをお送りいただければ、業務の流れを妨げることなく、人を守る最適なソリューションを設計します。






